Forum Replies Created
-
AuthorPosts
-
Hi Epiktetos!
Thanks for your words! It is always a pleasure to hear that more people are attracted to this project 🙂
I heard and seen some things about RoboDK and yes, if that software would work with Thor it would be very interesting.
But as RoboDK is neither Open Source nor free, it has not crossed my mind to explore how Thor could be compatible with this software.Anyway, if you are going to try it and I can help you in any way, don’t hesitate to ask me!
Best regards!
Very cool!! I love it! <3
Hello Sebasshare!
Looking at the video, and ruling out mechanical problems, it looks like it could be a power problem in the driver.
I would tell you to do a simple test. Try to move that joint holding the weight of the robot yourself, helping it with the load. If this does not produce a loss of steps in the motor, it is probably a power problem in the driver.
If so, you just have to adjust the driver voltage, increasing the current it provides to the motor of that joint to see if that solves it.Keep us updated!
—
Hola Sebasshare!
Viendo el video, y descartando problemas mecánicos, tiene pinta de que puede ser un problema de potencia en el driver.
Te diría de hacer una prueba sencilla. Prueba a mover esa articulación sosteniendo el peso del robot tu, ayudándole con la carga. Si de esta forma no se produce una pérdida de pasos en el motor, seguramente sea un problema de potencia en el driver.
De ser así, solo tienes que ajustar el voltaje del driver, aumentando la intensidad que proporciona al motor de esa articulación a ver si así se soluciona.Mantennos al tanto!
Hi Mohamed! No need to apologize! You see I can’t answer immediately sometimes either.
The firmware I use to move Thor is a modified version of GRBL. And instead of using steps/mm what I did was to use steps/degree.
That is, the DEFAULT_X_STEPS_PER_MM variables of GRBL config files units are steps per rotation degree instead of steps per mm. And these are the values of the vars:#define DEFAULT_A_STEPS_PER_MM 44.5 #define DEFAULT_B_STEPS_PER_MM 270.0 #define DEFAULT_C_STEPS_PER_MM 270.0 #define DEFAULT_D_STEPS_PER_MM 265.0 #define DEFAULT_E_STEPS_PER_MM 20.0 #define DEFAULT_F_STEPS_PER_MM 250.0 #define DEFAULT_G_STEPS_PER_MM 250.0To calculate each one I just used the step angle of the stepper motor (usually 1.8 deg), the gear ratio of each articulation and the microstepping of the driver (usually 1/16).
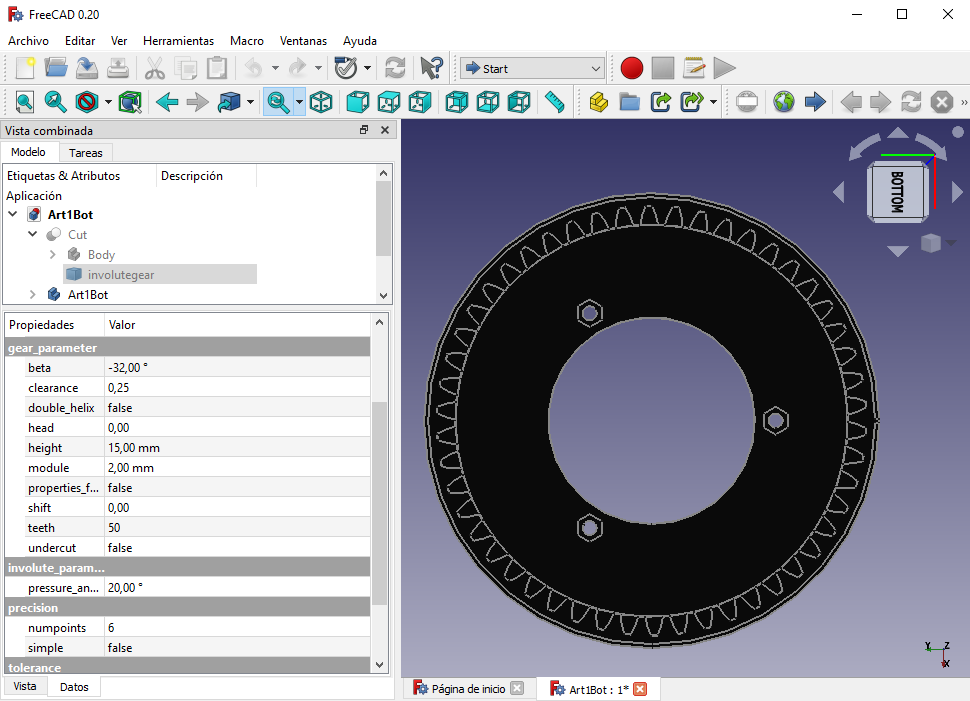
For example, for the first articulation, we have a stepper motor with 1.8 deg/step, a gear ratio of 5:1 (as the driver gear has 10 teeth and the driven one 50 teeth), and a microstepping of 1/16 configured in the stepper driver. So, (1/1.8)*16*5 = 44.4444… Rounding up to 44.5.About the printed gears, I used helical geard instead of spur gears because they have hreater tooth strength and can withstand higher loads. The parameter of each gear (module, angle, teeth, etc) can be seen in the FreeCAD model. If you open the FCStd file of a part with a gear, you can navigate through the Tree View to the involutegear object to see the parameters:
Hope this helps! 🙂
Hi Mohamed!
Your Thor looks great! I hope you will tell us more in the future about the control software in matlab 🙂
Now it is registered in the Worldwide Section as the number #25!
Welcome to Thor family 😉
Hello necaettin,
I don´t know what part are you referring to. If you are looking for the gripper STL files you can find them all in Thor’s github repository
Hope it helps!
Thanks for the contribution! 😉
That’s what I was thinking…
Could I ask you for that design as well? I would like to include it in the modifications section of the github repository along with the design of your end-effector!
In fact, if you have a github account and want to make a pull request with your designs to Thor’s repository, I’ll be happy to accept it 🙂Some time ago I also thought about developing my own firmware. Actually, with GRBL, Thor’s movements are not like those of a normal robot, since the movement of all motors starts and ends at the same time, making linear movements not possible. Or at least I think so.
If you decide to design your own firmware, please keep me updated!Hi Mendy!
You can see the configuration files of GRBL I modified in order to make it work for Thor: https://github.com/angellm/grbl
However, these are the most relevant ones:
Steppers ENABLE/DISABLE signal
#define STEPPERS_DISABLE_BIT 1 // MEGA2560 Digital Pin 40Steppers STEP signals
#define A_STEP_BIT 6 // MEGA2560 Digital Pin 28 #define B_STEP_BIT 4 // MEGA2560 Digital Pin 26 #define C_STEP_BIT 2 // MEGA2560 Digital Pin 24 #define D_STEP_BIT 0 // MEGA2560 Digital Pin 22 #define E_STEP_BIT 1 // MEGA2560 Digital Pin 23 #define F_STEP_BIT 3 // MEGA2560 Digital Pin 25 #define G_STEP_BIT 5 // MEGA2560 Digital Pin 27Steppers DIR signals
#define A_DIRECTION_BIT 1 // MEGA2560 Digital Pin 36 #define B_DIRECTION_BIT 3 // MEGA2560 Digital Pin 34 #define C_DIRECTION_BIT 5 // MEGA2560 Digital Pin 32 #define D_DIRECTION_BIT 7 // MEGA2560 Digital Pin 30 #define E_DIRECTION_BIT 6 // MEGA2560 Digital Pin 31 #define F_DIRECTION_BIT 4 // MEGA2560 Digital Pin 33 #define G_DIRECTION_BIT 2 // MEGA2560 Digital Pin 35Endstop signals
#define A_LIMIT_BIT 7 // MEGA2560 Digital Pin 42 #define B_LIMIT_BIT 5 // MEGA2560 Digital Pin 44 #define C_LIMIT_BIT 5 // MEGA2560 Digital Pin 44 //3 // MEGA2560 Digital Pin 46 #define D_LIMIT_BIT 1 // MEGA2560 Digital Pin 48 #define E_LIMIT_BIT 0 // MEGA2560 Digital Pin 49 #define F_LIMIT_BIT 2 // MEGA2560 Digital Pin 47 #define G_LIMIT_BIT 2 // MEGA2560 Digital Pin 47//4 // MEGA2560 Digital Pin 45Tool signal:
#define SPINDLE_ENABLE_BIT 4 // MEGA2560 Digital Pin 7As soon as I have some time I’ll add it to the mods folder at Thor’s repository and I’ll note it down to incorporate it for future versions! 🙂
Thank you very much for contributing to the project! 🙂
Impressive job! Thanks for sharing the design! 🙂
I noticed that your robot has bearing supports under the second joint. It seems to me a great solution to release the load that falls on the axis. Have you noticed improvement in the movement?
Woah! Very clever!
Do you designed it in FreeCAD? If so, can you share the .fcstd file too? I would love to incorporate your design for future versions of Thor!Thanks for sharing 🙂
Hi Mohamed!
Sorry, I have been busy these weeks and I just read your question.
I think that the problem could be related with the homing process. As you don’t have sensors to home the motors, GRBL doesn’t have a reference to start the motion. I think you can do a manual homing by placing the robot in the fully stretched upward position and sending the “Kill alarm lock” command ($X).
Here you have the documentation of GRBL commands in case you need it: https://github.com/gnea/grbl/blob/master/doc/markdown/commands.md
Hi Mendy!
The 0.4A is the current drawn by each phase of the stepper. As we are using bipolar (2 poles) stepper motors, there are 2 phases. So the total current drawn by the stepper should be around 0.8A at 12V.
Let me know if it helps!
-
AuthorPosts