Hello Stephen,
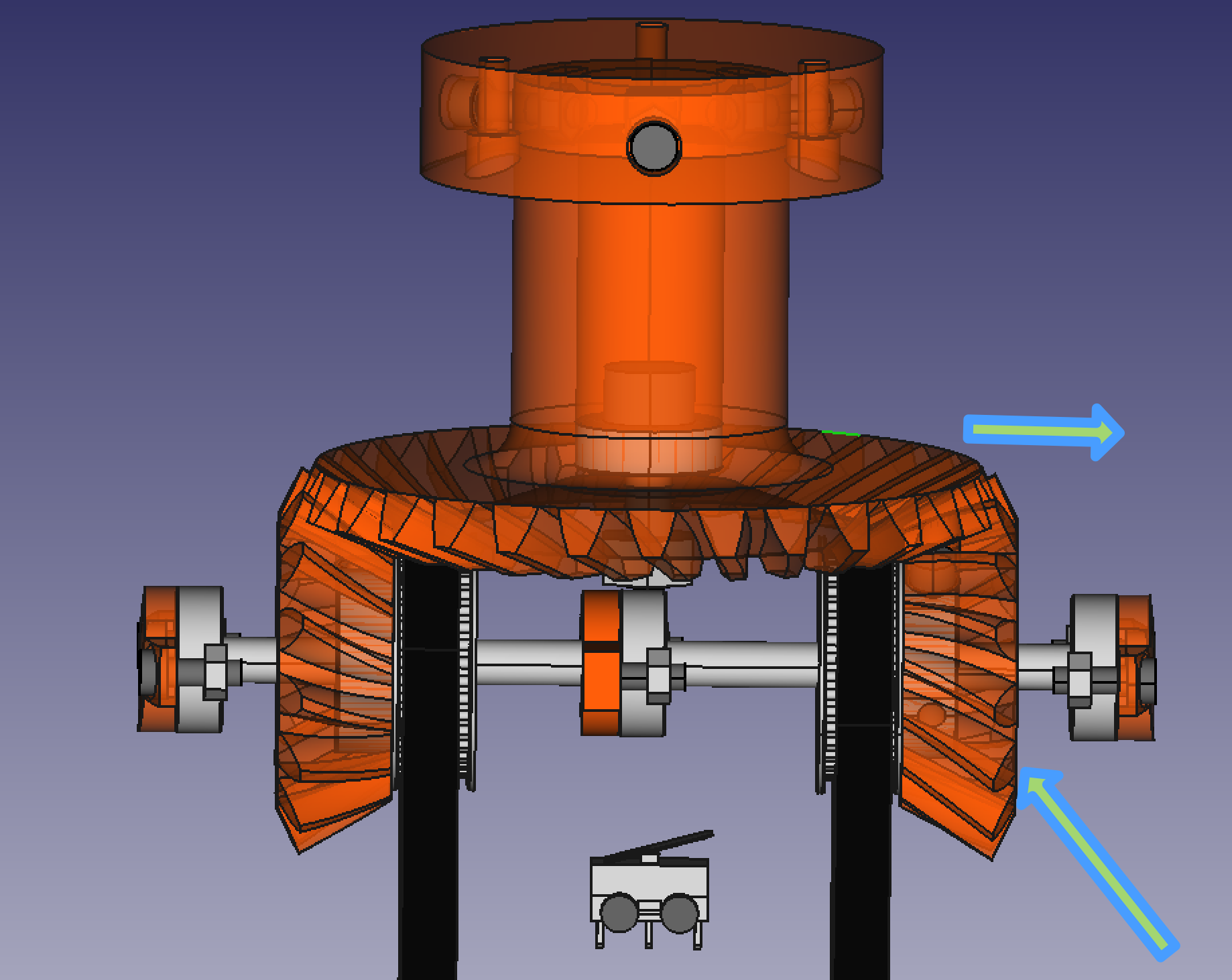
We are also trying to finish our building of Thor. As you say, those gears, since they are beveled, are object of a force that push them outwards, and since you cannot fix them to the rod, we decided to add some washers between every bearing and the gears. It is not a very technical solution but it works for us. The only solution we considered in addition to this one is using two half rods, one for avery bearing-pulley set, and modify the central piece that acts as another support for the rods. In this way you could fix the bearing-pulley sets to the rods, avoiding the axial movement. But we thought it was far more difficult to manage, so we took the first option.
RegardsRafael
.