- This topic has 2 replies, 2 voices, and was last updated 4 years, 4 months ago by
 Angel LM.
Angel LM.
-
AuthorPosts
-
March 9, 2022 at 6:03 pm #1895
Buenas tardes a todos:
Tengo una duda que me está quitando el sueño: empezamos el desarrollo del brazo Thor como parte del trabajo final para recibirnos de Ingenieros Electrónicos en la Universidad Nacional de San Martin (UNSAM) en Argentina, y creamos el modelado del brazo considerando que cada articulacion tiene un motor único. Pero cuando vimos el ensamblado notamos que dos de las articulaciones (la 2-3 y 5-6) llevan dos motores y que según la combinación de los sentidos de giro que éstos tengan, puede hacer mover por ejemplo la articulacion 5 o la 6. La pregunta es: supongamos que los ángulos de las articulaciones son q5 y q6 (ambos no nulos) cómo es que se van a mover los motores de acuerdo a nuestro planteo de motor individual, ya que si giran en sentido moverán la articulación 5 y si están en sentido contrario moverán la 6.
Espero haberme hecho entender.
Perdón por la traducción.
Gracias!!!Good afternoon everyone:
I have a doubt that is taking away my sleep: we started the development of the Thor arm as part of the final work to receive our degree in Electronic Engineering at the National University of San Martin (UNSAM) in Argentina, and we created the modeling of the arm considering that each joint has a single motor. But when we saw the assembly we noticed that two of the joints (2-3 and 5-6) have two motors and that depending on the combination of the directions of rotation that they have, can move for example joint 5 or 6. The question is: suppose that the angles of the joints are q5 and q6 (both non-zero) how are the motors going to move according to our single motor approach, because if they rotate in one direction they will move joint 5 and if they are in the opposite direction they will move joint 6.
I hope I have made myself understood.
Sorry for the translation.
Thanks!!!March 14, 2022 at 11:09 am #1897Hola Sebas,
La articulación 5-6 es un mecanismo conocido como semi-diferencial. Este mecanismo permite conseguir rotación en 2 ángulos (q5 y q6) utilizando dos piñones y una corona. En este video puede verse el funcionamiento.
Recuerdo que hace años, cuando resolví la cinemática directa e inversa del robot, encontré una relación entre los ángulos de giro de cada piñón y los ángulos q5y q6, aunque por más que he buscado no he dado con ello.
La teoría era la siguiente:
– Si los dos piñones giran el mismo ángulo en el mismo sentido, se produce una rotación en q5 y q6 no rota.
– Si los dos piñones giran el mismo ángulo en sentido inverso, se produce una rotación en q6 y q5 no rota.
– Si el piñón A gira un ángulo distinto al piñón B, se produce una rotación en q5 y en q6. Existe una relación entre el ángulo que gira cada piñón y los ángulos q5 y q6.A ver cuando puedo ponerme a documentar la cinemática del robot y volver a calcular esa relación de nuevo.
¡Un saludo!
—-
Hi Sebas,
The 5-6 joint is a mechanism known as semi-differential. This mechanism allows to achieve rotation at 2 angles (q5 and q6) using two gears and a crown wheel. In this video you can see how it works. I remember that years ago, when I solved the direct and inverse kinematics of the robot, I found a relationship between the rotation angles of each pinion and the angles q5and q6, although I have not found it.
The theory was as follows:
– If the two gears rotate the same angle in the same direction, there is a rotation at q5 and q6 does not rotate.
– If the two gears rotate the same angle in the reverse direction, a rotation occurs at q6 and q5 does not rotate.
– If the A gear turns a different angle than the B gear, there is a rotation at q5 and at q6. There is a relationship between the angle that each pinion turns and the angles q5 and q6.Let’s see when I can get around to documenting the robot’s kinematics and recalculating that ratio again.
Regards!
March 14, 2022 at 11:18 pm #1899I couldn’t help myself and have been thinking about this.
I think the solution is as follows if we take into account the following sign convention for rotations: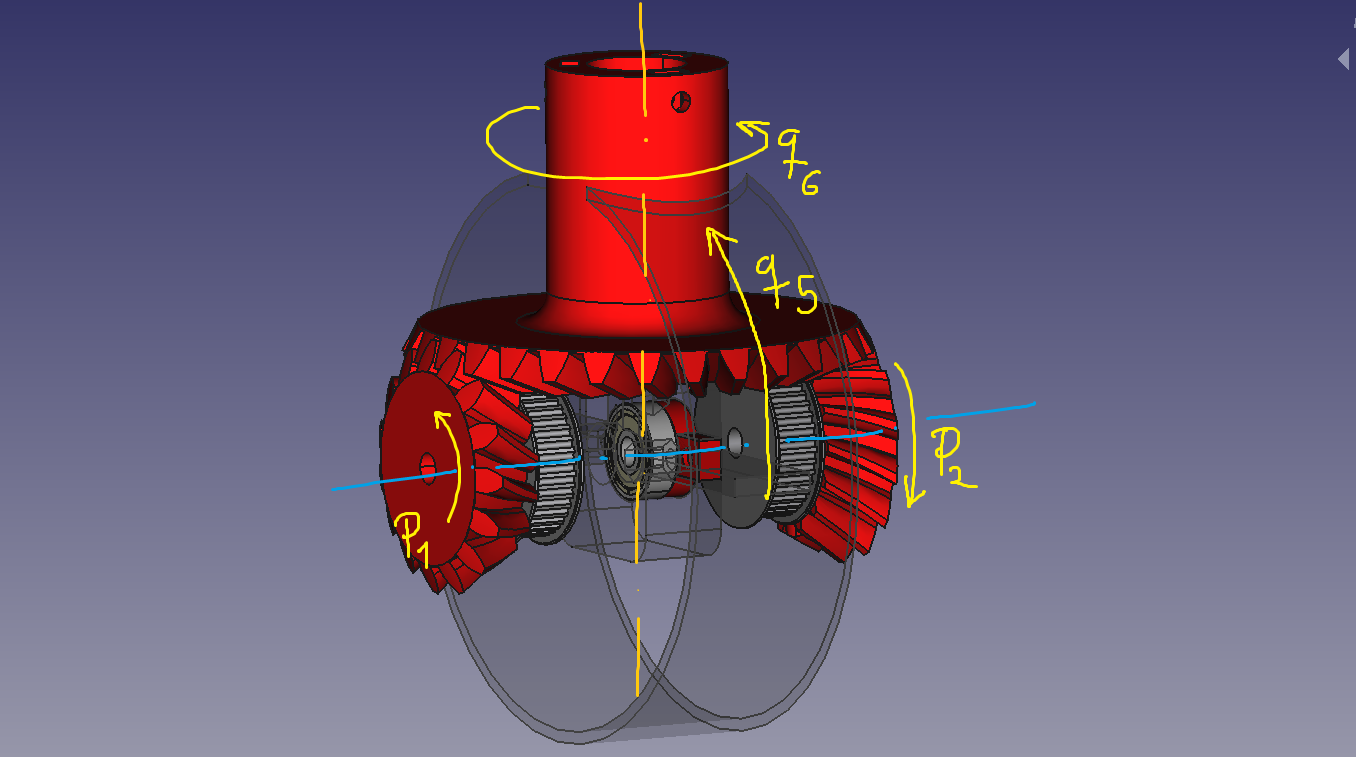
p1 represents the angle rotated by pinion 1.
p2 represents the angle rotated by pinion 2.
q5 and q6 refer to the angles of joints 5 and 6 respectively.I think these equations are correct:
q5 = (p1-p2)/2
q6 = r*(p1+p2)/2
r = pinion teeths / crown wheel teethsI have obtained these equations by an empirical analysis of the problem and not by analyzing in depth the theory of the mechanism, so I could be wrong.
I hope it helps!
-
AuthorPosts
- You must be logged in to reply to this topic.