Thor robot looked very interesting and promising as a project for our kid’s club (kids are 7-13 years old). So we build 2. I have assembled/disassembled each probably 6 or 7 times already trying to make them work and I hope they will not fail me at the Philly Maker Fair.
Running them from RAMPS 1.4 with CNC shield expansion board. ;Made them to work with modified 6 axis grbl with servo control (added servo control for Mega 2560 myself)So we move it using gcode.
Main complaint from kids – it is painfull to file printed parts so M3 nuts will fit in.Need to use hot glue gun to fix M3 nuts as some parts are not accessible during assembly.
Complaints from me:
– use of 0.4A Nema 17 motors. If a little taller (by 5mm) 1.5A motors used they will not overheat as easy as 0.4A motors and offer more torque, but it will require redesign of parts.
– Art1 to Art2 axel, ;
– common bearing fix smashed by bolts, ;
– In order to fix Art4, you have to disassemble Art2, Art3, and Art4 ;
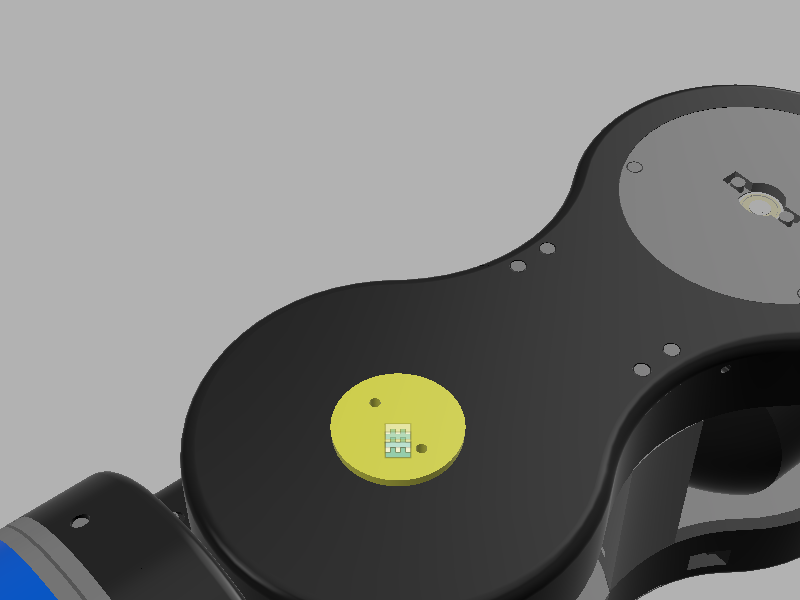
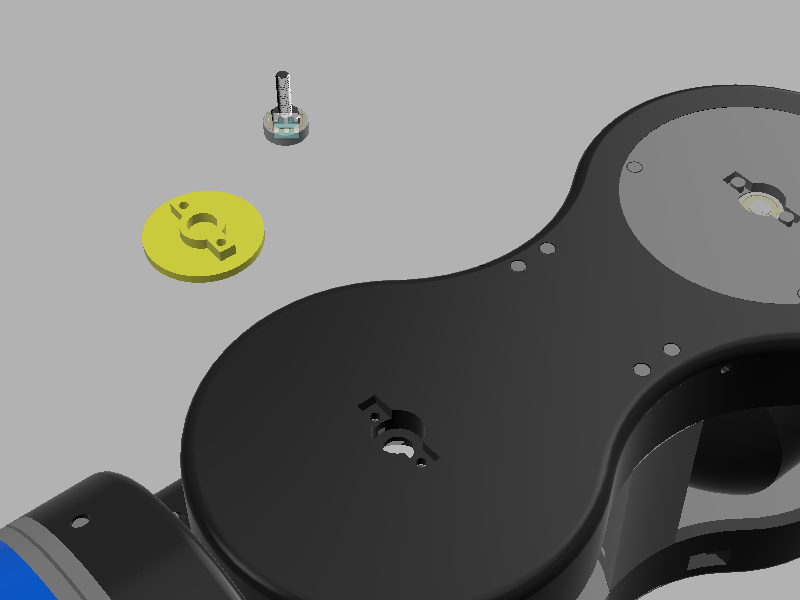
Some updates which I made for the armTo stiffen Art1 to Art2 axel we have used cut to size M5 bolts with nuts tighten to bearings.
This setup works much better. Redesigned a common bearings fixes on Art2.Redesigned Art4 bearing shaft to use 2 layers of balls.
Files may be found at ;https://www.thingiverse.com/thing:3899758
 .
.